FBVLOS (FORWARD BEYOND VISUAL LINE OF SIGHT) - BEST PRACTICES
DISCLAIMER:
This is STILL VISUAL LINE OF SIGHT. It's how to make best use of MavicPro or Phantom 4 range and still play by the rules
CANDA SFOC allows only VLOS operations only and so either the Pilot In Command (PIC) or the Observer (OBS) must have a direct unaided VLOS (Visual Line Of Sight) at all times. FVLOS (Forward VLOS) Ops does mean no visual contact with the UAV, but it can be out of sight for the PIC for parts of a flight. It still requires one or the other to be able to see the UAV and the obstacles on the ground or aircraft in the sky around it, at all times. Whenever visual sight is lost by BOTH operators, as long as telemetry , video and geo-location displays are consistent with planned flight path, the mission may continue uninterrupted (for several seconds.) while they attempt to reacquire VLOS. Example; flying behind a row of trees or a corn field, you can see ahead in the camera view, and everything is clear overhead, but you (the PIC) do not have VLOS at all times.
However, maybe as PIC you, yourself, can't get to the location of interest across a lake or way down a valley or up the side of the mountain maybe half a mile away? (NOTE: a small 1kg machine is not visually "seeable" in daylight beyond about 1500ft . . it's just too small). But, remember that's why you bought this expensive camera so you can get up close without having to go there.. Perhaps you want video of the whole length of train track, fence line pipeline or waterway, and you loose sight of the UAV within a few hundred feet, just because it's so small. ie like a Phantom 4 or Mavic Pro. You can still fly ForwardVLOS and still be legally IN VLOS by using a Forward Observer (FOBS). Either way, you can both still scan the area of sky or ground looking down a valley where you know the UAV is and confirm there are no other larger flying objects or obstacles nearby . . . . so, with visual camera views, built-in obstacle avoidance sensors and a FOBS who can still see the drone at all times, still fly safely and still legal within 1320ft (1/4 mile).
This is STILL VISUAL LINE OF SIGHT. It's how to make best use of MavicPro or Phantom 4 range and still play by the rules
CANDA SFOC allows only VLOS operations only and so either the Pilot In Command (PIC) or the Observer (OBS) must have a direct unaided VLOS (Visual Line Of Sight) at all times. FVLOS (Forward VLOS) Ops does mean no visual contact with the UAV, but it can be out of sight for the PIC for parts of a flight. It still requires one or the other to be able to see the UAV and the obstacles on the ground or aircraft in the sky around it, at all times. Whenever visual sight is lost by BOTH operators, as long as telemetry , video and geo-location displays are consistent with planned flight path, the mission may continue uninterrupted (for several seconds.) while they attempt to reacquire VLOS. Example; flying behind a row of trees or a corn field, you can see ahead in the camera view, and everything is clear overhead, but you (the PIC) do not have VLOS at all times.
However, maybe as PIC you, yourself, can't get to the location of interest across a lake or way down a valley or up the side of the mountain maybe half a mile away? (NOTE: a small 1kg machine is not visually "seeable" in daylight beyond about 1500ft . . it's just too small). But, remember that's why you bought this expensive camera so you can get up close without having to go there.. Perhaps you want video of the whole length of train track, fence line pipeline or waterway, and you loose sight of the UAV within a few hundred feet, just because it's so small. ie like a Phantom 4 or Mavic Pro. You can still fly ForwardVLOS and still be legally IN VLOS by using a Forward Observer (FOBS). Either way, you can both still scan the area of sky or ground looking down a valley where you know the UAV is and confirm there are no other larger flying objects or obstacles nearby . . . . so, with visual camera views, built-in obstacle avoidance sensors and a FOBS who can still see the drone at all times, still fly safely and still legal within 1320ft (1/4 mile).
|
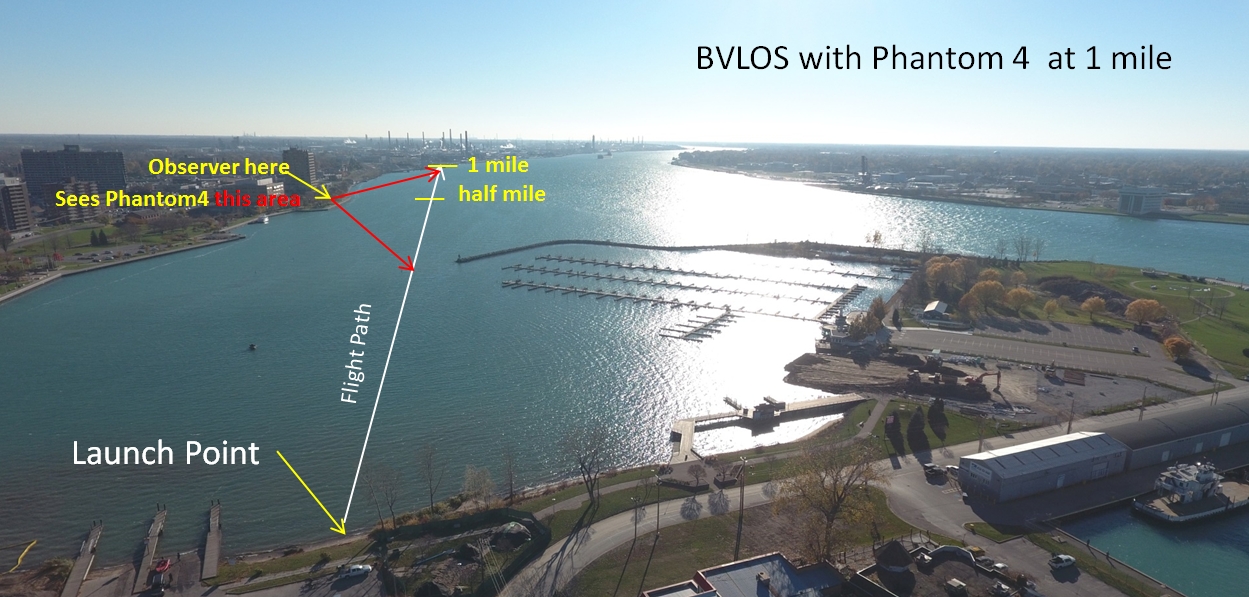
Flight testing shows that a launch site should be within approximately 1 mile of the "Area of Interest" with a FOBS located either at that site or at least ½ way in between depending on terrain and obstructions. Due to the small visual cross-section of the UAV the OBS will need to position themselves no more than 2000-3000ft from the launch point. Phantom 4 UAV is bright white but only 2 ft across and is visible the unaided eye out to approximately 1300-1500ft in good lighting conditions. The MavicPro is even smaller cross-section and dark grey, so actual VLOS may be lost sooner and the Forward Observer (OBS) position must be planned to be closer, especially during dawn or dusk missions. I'm now testing some miniature high-intensity strobe lights (carried by the UAV) to see if that range can be safely extended. (more on that later)
Technically this is NOT BVLOS. The Phantom 4 is in visual line of sight at all times by the Phantom 4's two man crew. |

STROBE with Self-Contained FLASH and BATTERY
|
Here's what you need:
1. An Observer qualified to act as one and briefed on where and how you want to fly. Train one on how to work with you.
2. A set of walkie-talkies with hands Free Headset . . . IMPORTANT: PIC headset must have VOX (Voice activated Transmission)
3. A little planning and voice procedure. ie Discuss the mission and use standard phases over the radio that you agree on and practice before hand . . .that avoids misunderstanding and wasted time when things are "up in the air".
4. Some (SOPs) Standard Operating Procedures that cover all planned normal and emergency activities. This avoids unnecessary talking so you already know what each other will do under various circumstances - no confusion - no wasted time. ( this is all part of responsible Flight Safety and CRM (Crew Resource Management) for safe and effective UAV ops.
EXAMPLE: LOST Procedure
IF either PIC or FOBS lose sight call "LOST"
PIC or FOBS can Challenge/Reply "IN-SIGHT?" not "I GOT IT" . . . "IN-SIGHT" is the operative term. Nothing else sounds like it.
IF not in sight PIC must immediately manoeuver if both fail to see at the same time.
PIC calls manoeuver ie "CLIMBING" or "GOING RIGHT" etc ie climb or turn or wait 10 sec if auto sequence in progress.
IF PIC has UAV in view - Call "IN SIGHT - CONTINUING" (ie momentarily obscured by tree or obstacle)
IF only FOBS has "IN SIGHT" pilot must re-acquire in 10 sec (just count it off in your head)
or RTL must be initiated immediately
After mentally timing ~ 10 sec from "LOST" call again "LOST"
Meantime OBS may use binoculars to re-acquire - Guide Pilot return to “IN-SIGHT”
Here's where precise agreed radio procedure will avoid confusion. "LOST" and "IN-SIGHT" are only used to one purpose and never used with other words that can get lost in the transmission. If you transmit "Not in sight" and the only words the PIC might here are " . . . IN-SIGHT!" and that would be confusing and misleading. I could lead to not recognizing a problem until it hit something. If you hear LOST it's still NOT IN SIGHT and it can't be confused. If all you hear is "SIGHT" then you know it's been reacquired.
Failure to re-acquire visually by either PIC or FOBS after manoeuvering or returning to last known position requires the PIC to issue RTL command. If UAV is then re-acquired VLOS by either PIC or FOBS then the remaining planned flight path can be resumed. If not, then the PIC will confirm by telemetry and/or verbally that the UAV is returning or he must attempt to immediately land in a suitable recovery area or consider issuing a CSC (Combined Stick Command) to terminate the flight. In-Flight termination by CSC should be a last resort, and will only be initiated by PIC if the PIC can determine that doing so will minimize the risk to people and property, versus allowing the UAV to continue on it’s current flight path either commanded or pre-programmed.
OBSERVER DUTIES DURING FORWARD OPERATIONS
1. After mission briefing FOBS goes to forward position (or half way in between, and evaluates forward site for weather, lighting, local activity etc and then takes up position for best line of site to acquire the incoming UAV.
2. FOBS contacts PIC establishing radio contact and reports status of forward site.
3. PIC responds with expected start-up time and launch time. OBS may still assist with Pre-Flight/In-flight Checklist via radio.
4. PIC reports "LIFT OFF" to the FOBS with locating advice for where to spot the approaching UAV.
5. FOBS reports “IN-SIGHT” on incoming drone and provides PIC with mission support and, keeping drone in sight at all times.
6. PIC Calls “Return to launch” and leaves the site, FAC follows it until it is lost to view and reports “LOST” when he can no longer see it.
7. Once PIC has acquired the UAV visually he reports “IN-SIGHT -RETURN TO MISSION RV, and FOBS is then free to leave the forward site and proceed as planned Rendezvous (RV) Point for debriefing.
1. An Observer qualified to act as one and briefed on where and how you want to fly. Train one on how to work with you.
2. A set of walkie-talkies with hands Free Headset . . . IMPORTANT: PIC headset must have VOX (Voice activated Transmission)
3. A little planning and voice procedure. ie Discuss the mission and use standard phases over the radio that you agree on and practice before hand . . .that avoids misunderstanding and wasted time when things are "up in the air".
4. Some (SOPs) Standard Operating Procedures that cover all planned normal and emergency activities. This avoids unnecessary talking so you already know what each other will do under various circumstances - no confusion - no wasted time. ( this is all part of responsible Flight Safety and CRM (Crew Resource Management) for safe and effective UAV ops.
EXAMPLE: LOST Procedure
IF either PIC or FOBS lose sight call "LOST"
PIC or FOBS can Challenge/Reply "IN-SIGHT?" not "I GOT IT" . . . "IN-SIGHT" is the operative term. Nothing else sounds like it.
IF not in sight PIC must immediately manoeuver if both fail to see at the same time.
PIC calls manoeuver ie "CLIMBING" or "GOING RIGHT" etc ie climb or turn or wait 10 sec if auto sequence in progress.
IF PIC has UAV in view - Call "IN SIGHT - CONTINUING" (ie momentarily obscured by tree or obstacle)
IF only FOBS has "IN SIGHT" pilot must re-acquire in 10 sec (just count it off in your head)
or RTL must be initiated immediately
After mentally timing ~ 10 sec from "LOST" call again "LOST"
Meantime OBS may use binoculars to re-acquire - Guide Pilot return to “IN-SIGHT”
Here's where precise agreed radio procedure will avoid confusion. "LOST" and "IN-SIGHT" are only used to one purpose and never used with other words that can get lost in the transmission. If you transmit "Not in sight" and the only words the PIC might here are " . . . IN-SIGHT!" and that would be confusing and misleading. I could lead to not recognizing a problem until it hit something. If you hear LOST it's still NOT IN SIGHT and it can't be confused. If all you hear is "SIGHT" then you know it's been reacquired.
Failure to re-acquire visually by either PIC or FOBS after manoeuvering or returning to last known position requires the PIC to issue RTL command. If UAV is then re-acquired VLOS by either PIC or FOBS then the remaining planned flight path can be resumed. If not, then the PIC will confirm by telemetry and/or verbally that the UAV is returning or he must attempt to immediately land in a suitable recovery area or consider issuing a CSC (Combined Stick Command) to terminate the flight. In-Flight termination by CSC should be a last resort, and will only be initiated by PIC if the PIC can determine that doing so will minimize the risk to people and property, versus allowing the UAV to continue on it’s current flight path either commanded or pre-programmed.
OBSERVER DUTIES DURING FORWARD OPERATIONS
1. After mission briefing FOBS goes to forward position (or half way in between, and evaluates forward site for weather, lighting, local activity etc and then takes up position for best line of site to acquire the incoming UAV.
2. FOBS contacts PIC establishing radio contact and reports status of forward site.
3. PIC responds with expected start-up time and launch time. OBS may still assist with Pre-Flight/In-flight Checklist via radio.
4. PIC reports "LIFT OFF" to the FOBS with locating advice for where to spot the approaching UAV.
5. FOBS reports “IN-SIGHT” on incoming drone and provides PIC with mission support and, keeping drone in sight at all times.
6. PIC Calls “Return to launch” and leaves the site, FAC follows it until it is lost to view and reports “LOST” when he can no longer see it.
7. Once PIC has acquired the UAV visually he reports “IN-SIGHT -RETURN TO MISSION RV, and FOBS is then free to leave the forward site and proceed as planned Rendezvous (RV) Point for debriefing.